adafruit_featherwing.ina219_featherwing¶
Helper for using the INA219 FeatherWing.
- Author(s): Kattni Rembor
-
class
adafruit_featherwing.ina219_featherwing.INA219FeatherWing(i2c=None)[source]¶ Class representing an Adafruit INA219 FeatherWing.
Automatically uses the feather’s I2C bus.
-
bus_voltage¶ Bus voltage returns volts.
This example prints the bus voltage with the appropriate units.
from adafruit_featherwing import ina219_featherwing import time ina219 = ina219_featherwing.INA219FeatherWing() while True: print("Bus Voltage: {} V".format(ina219.bus_voltage)) time.sleep(0.5)
-
current¶ Current returns mA.
This example prints the current with the appropriate units.
from adafruit_featherwing import ina219_featherwing import time ina219 = ina219_featherwing.INA219FeatherWing() while True: print("Current: {} mA".format(ina219.current)) time.sleep(0.5)
-
shunt_voltage¶ Shunt voltage returns volts.
This example prints the shunt voltage with the appropriate units.
from adafruit_featherwing import ina219_featherwing import time ina219 = ina219_featherwing.INA219FeatherWing() while True: print("Shunt Voltage: {} V".format(ina219.shunt_voltage)) time.sleep(0.5)
-
voltage¶ Voltage, known as load voltage, is bus voltage plus shunt voltage. Returns volts.
This example prints the voltage with the appropriate units.
from adafruit_featherwing import ina219_featherwing import time ina219 = ina219_featherwing.INA219FeatherWing() while True: print("Voltage: {} V".format(ina219.voltage)) time.sleep(0.5)
-
adafruit_featherwing.joy_featherwing¶
Helper for using the Joy FeatherWing.
- Author(s): Kattni Rembor
-
class
adafruit_featherwing.joy_featherwing.JoyFeatherWing(i2c=None)[source]¶ Class representing an Adafruit Joy FeatherWing.
Automatically uses the feather’s I2C bus.
Joy featherwing button A.
This example prints when button A is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_a: print("Button A pressed!")
Joy featherwing button B.
This example prints when button B is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_b: print("Button B pressed!")
Joy featherwing button SELECT.
This example prints when button SELECT is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_select: print("Button SELECT pressed!")
Joy featherwing button X.
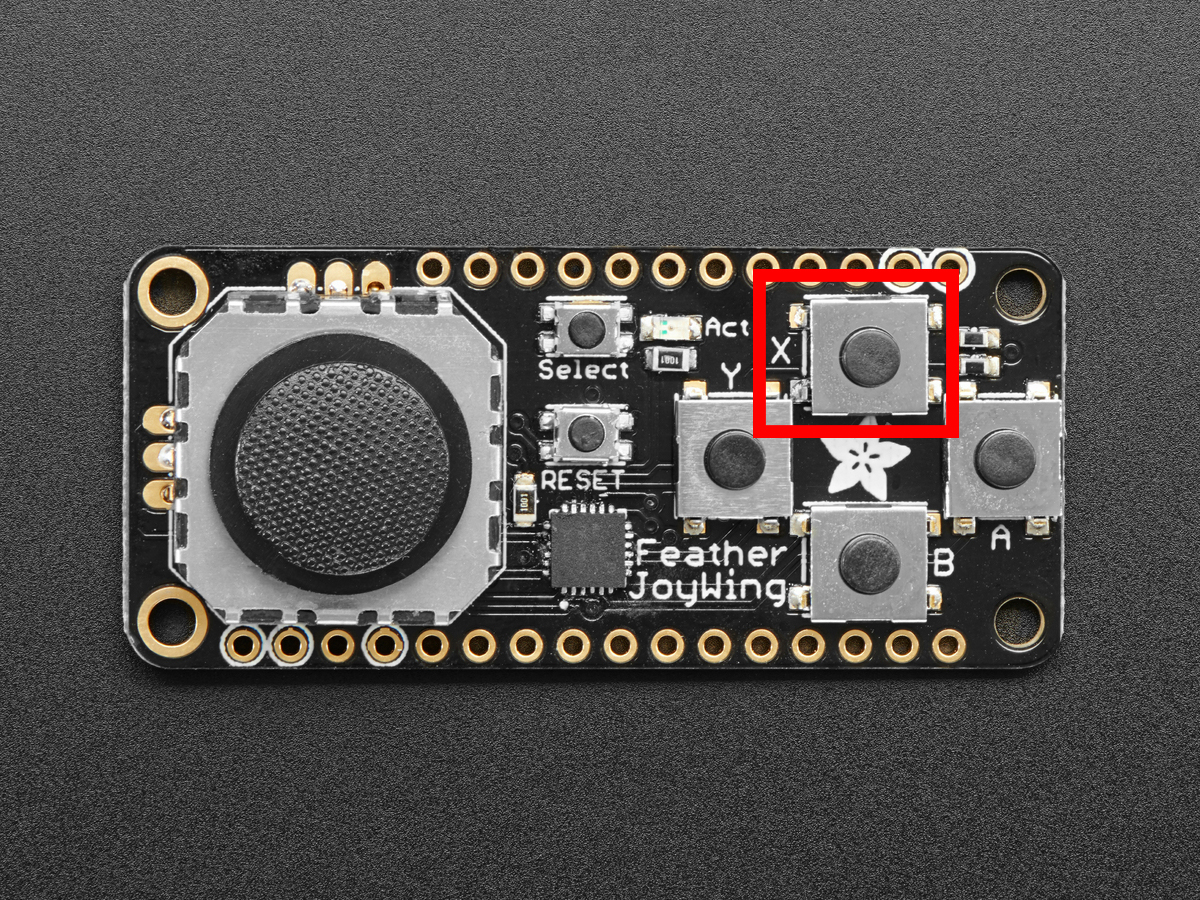
This example prints when button X is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_x: print("Button X pressed!")
Joy featherwing button Y.
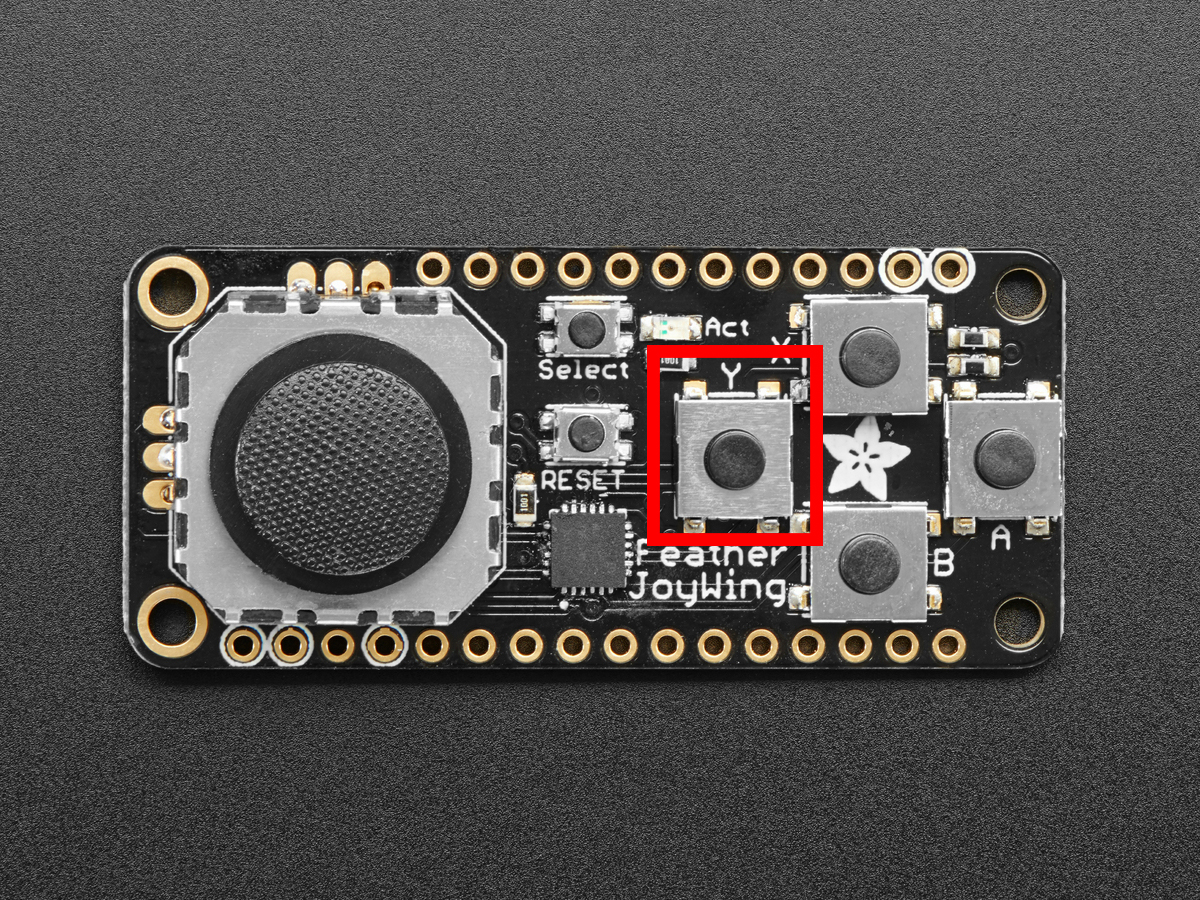
This example prints when button Y is pressed.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() while True: if wing.button_y: print("Button Y pressed!")
-
joystick¶ Joy FeatherWing joystick.
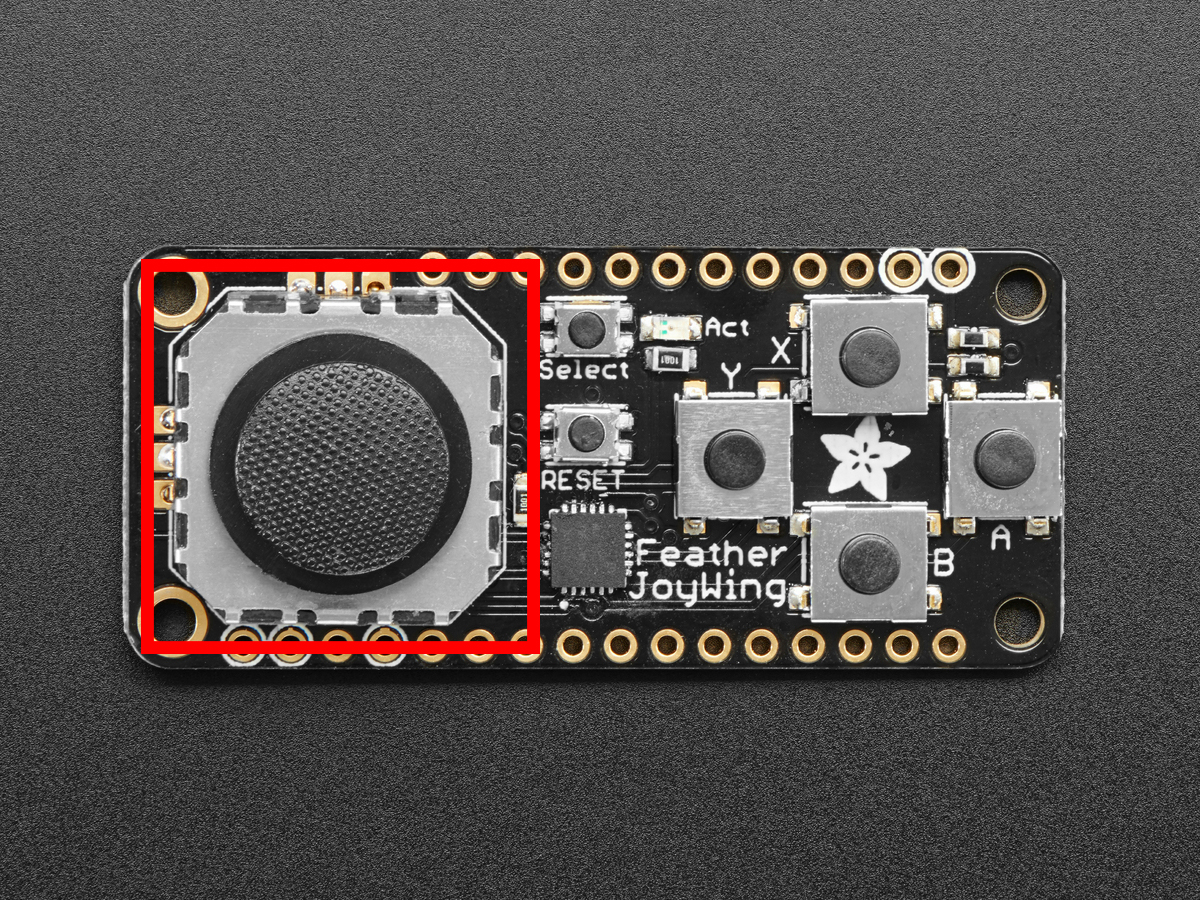
This example zeros the joystick, and prints the coordinates of joystick when it is moved.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() last_x = 0 last_y = 0 wing.zero_joystick() while True: x, y = wing.joystick if (abs(x - last_x) > 3) or (abs(y - last_y) > 3): last_x = x last_y = y print(x, y) time.sleep(0.01)
-
joystick_offset¶ Offset used to correctly report (0, 0) when the joystick is centered.
Provide a tuple of (x, y) to set your joystick center to (0, 0). The offset you provide is subtracted from the current reading. For example, if your joystick reads as (-4, 0), you would enter (-4, 0) as the offset. The code will subtract -4 from -4, and 0 from 0, returning (0, 0).
This example supplies an offset for zeroing, and prints the coordinates of the joystick when it is moved.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() last_x = 0 last_y = 0 while True: wing.joystick_offset = (-4, 0) x, y = wing.joystick if (abs(x - last_x) > 3) or (abs(y - last_y) > 3): last_x = x last_y = y print(x, y) time.sleep(0.01)
-
zero_joystick()[source]¶ Zeros the joystick by using current reading as (0, 0). Note: You must not be touching the joystick at the time of zeroing for it to be accurate.
This example zeros the joystick, and prints the coordinates of joystick when it is moved.
from adafruit_featherwing import joy_featherwing import time wing = joy_featherwing.JoyFeatherWing() last_x = 0 last_y = 0 wing.zero_joystick() while True: x, y = wing.joystick if (abs(x - last_x) > 3) or (abs(y - last_y) > 3): last_x = x last_y = y print(x, y) time.sleep(0.01)
adafruit_featherwing.alphanum_featherwing¶
Helper for using the 14-Segment AlphaNumeric FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.alphanum_featherwing.AlphaNumFeatherWing(address=112, i2c=None)[source]¶ Class representing an Adafruit 14-segment AlphaNumeric FeatherWing.
Automatically uses the feather’s I2C bus.
adafruit_featherwing.dotstar_featherwing¶
Helper for using the DotStar FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.dotstar_featherwing.DotStarFeatherWing(clock=<sphinx.ext.autodoc.importer._MockObject object>, data=<sphinx.ext.autodoc.importer._MockObject object>, brightness=0.2)[source]¶ Class representing a DotStar FeatherWing.
The feather uses pins D13 and D11
adafruit_featherwing.neopixel_featherwing¶
Helper for using the NeoPixel FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.neopixel_featherwing.NeoPixelFeatherWing(pixel_pin=<sphinx.ext.autodoc.importer._MockObject object>, brightness=0.1)[source]¶ Class representing a NeoPixel FeatherWing.
The feather uses pins D6 by default
-
shift_down(rotate=False)[source]¶ Shift all pixels down.
Parameters: rotate – (Optional) Rotate the shifted pixels to top (default=False) This example shifts 2 pixels down
import time from adafruit_featherwing import neopixel_featherwing neopixel = neopixel_featherwing.NeoPixelFeatherWing() # Draw Red and Green Pixels neopixel[4, 1] = (255, 0, 0) neopixel[5, 1] = (0, 255, 0) # Rotate it off the screen for i in range(0, neopixel.rows - 1): neopixel.shift_down(True) time.sleep(.1) time.sleep(1) # Shift it off the screen for i in range(0, neopixel.rows - 1): neopixel.shift_down() time.sleep(.1)
-
shift_up(rotate=False)[source]¶ Shift all pixels up
Parameters: rotate – (Optional) Rotate the shifted pixels to bottom (default=False) This example shifts 2 pixels up
import time from adafruit_featherwing import neopixel_featherwing neopixel = neopixel_featherwing.NeoPixelFeatherWing() # Draw Red and Green Pixels neopixel[4, 1] = (255, 0, 0) neopixel[5, 1] = (0, 255, 0) # Rotate it off the screen for i in range(0, neopixel.rows - 1): neopixel.shift_up(True) time.sleep(.1) time.sleep(1) # Shift it off the screen for i in range(0, neopixel.rows - 1): neopixel.shift_up() time.sleep(.1)
-
adafruit_featherwing.rtc_featherwing¶
Helper for using the DS3231 Precision RTC FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.rtc_featherwing.RTCFeatherWing(i2c=None)[source]¶ Class representing an DS3231 Precision RTC FeatherWing.
Automatically uses the feather’s I2C bus.
-
datetime¶ Passthru property to the ds3231 library for compatibility
-
day¶ The Current Day
-
get_month_days(month=None, year=None)[source]¶ Return the number of days for the month of the given year
Parameters:
-
hour¶ The Current Hour
-
is_leap_year(year=None)[source]¶ Check if the year is a leap year
Parameters: year (int) – (Optional) The year to check. If none is provided, current year is used.
-
minute¶ The Current Minute
-
month¶ The Current Month
-
now¶ The Current Date and Time in Named Tuple Style (Read Only)
-
second¶ The Current Second
-
unixtime¶ The Current Date and Time in Unix Time
-
weekday¶ The Current Day of the Week Value (0-6) where Sunday is 0
-
year¶ The Current Year
-
adafruit_featherwing.gps_featherwing¶
Helper for using the Ultimate GPS FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.gps_featherwing.GPSFeatherWing(update_period=1000, baudrate=9600)[source]¶ Class representing an Ultimate GPS FeatherWing.
Automatically uses the feather’s UART bus.
-
altitude¶ Return the Altitude in meters
-
fix_quality¶ Return the Fix Quality from the GPS
-
has_fix¶ Return whether the GPS has a Fix on some satellites
-
height_geoid¶ Return the Height GeoID in meters
-
horizontal_dilution¶ Return the Horizontal Dilution
-
latitude¶ Return the Current Latitude from the GPS
-
longitude¶ Return the Current Longitude from the GPS
-
read(size)[source]¶ Read the UART for any information that may be on it
Parameters: size (int) – The size in bytes of the data to retrieve Returns: Any data that is on the UART Return type: bytearray
-
satellites¶ Return the Number of Satellites we have a fix on
-
send_command(command)[source]¶ Send a bytearray command to the GPS module
Parameters: command (bytearray) – The command to send
-
speed_knots¶ Return the GPS calculated speed in knots
-
speed_kph¶ Return the GPS calculated speed in Kilometers per Hour
-
speed_mph¶ Return the GPS calculated speed in Miles per Hour
-
timestamp¶ Return the Fix Timestamp as a struct_time
-
track_angle¶ Return the Tracking angle in degrees
-
adafruit_featherwing.matrix_featherwing¶
Helper for using the Adafruit 8x16 LED Matrix FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.matrix_featherwing.MatrixFeatherWing(address=112, i2c=None)[source]¶ Class representing an Adafruit 8x16 LED Matrix FeatherWing.
Automatically uses the feather’s I2C bus.
-
blink_rate¶ Blink Rate returns the current rate that the pixels blink. 0 = Not Blinking 1-3 = Successively slower blink rates
-
brightness¶ Brightness returns the current display brightness. 0-15 = Dimmest to Brightest Setting
-
fill(fill)[source]¶ Turn all pixels on or off
Parameters: fill (bool) – True turns all pixels on, False turns all pixels off
-
shift_down(rotate=False)[source]¶ Shift all pixels down
Parameters: rotate – (Optional) Rotate the shifted pixels to top (default=False)
-
shift_left(rotate=False)[source]¶ Shift all pixels left
Parameters: rotate – (Optional) Rotate the shifted pixels to the right side (default=False)
-
shift_right(rotate=False)[source]¶ Shift all pixels right
Parameters: rotate – (Optional) Rotate the shifted pixels to the left side (default=False)
-
adafruit_featherwing.minitft_featherwing¶
Helper for using the Mini Color TFT with Joystick FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.minitft_featherwing.Buttons(up, down, left, right, a, b, select)¶ -
a¶ Alias for field number 4
-
b¶ Alias for field number 5
-
down¶ Alias for field number 1
-
left¶ Alias for field number 2
-
right¶ Alias for field number 3
-
select¶ Alias for field number 6
-
up¶ Alias for field number 0
-
-
class
adafruit_featherwing.minitft_featherwing.MiniTFTFeatherWing(address=94, i2c=None, spi=None, cs=None, dc=None)[source]¶ Class representing an Mini Color TFT with Joystick FeatherWing.
Automatically uses the feather’s I2C bus.
-
backlight¶ Return the current backlight duty cycle value
Return a set of buttons with current push values
-
adafruit_featherwing.tempmotion_featherwing¶
Helper for using the Adafruit ADXL343 + ADT7410 Sensor FeatherWing.
- Author(s): Melissa LeBlanc-Williams
-
class
adafruit_featherwing.tempmotion_featherwing.TempMotionFeatherWing(adxl343_address=83, adt7410_address=72, i2c=None)[source]¶ Class helper representing an Adafruit ADXL343 + ADT7410 Sensor FeatherWing.
Automatically uses the feather’s I2C bus.
-
acceleration¶ Returns the ADXL343 Acceleration
-
configuration¶ Returns the ADT7410 Configuration
-
data_rate¶ The data rate of the sensor.
-
events¶ Returns the ADXL343 Enabled Events
-
range¶ The measurement range of the sensor.
-
status¶ Returns the ADT7410 Status
-
temperature¶ Returns ADT7410 Temperature
-